
浮動小数誤差解析
浮動小数誤差解析(floating
point error
analysis)とは浮動小数演算機構を前提にした誤差解析のことを言う。それは個々の基本演算の結果として生じる相対誤差をベースにしている。ここではその考え方を紹介する意味で、浮動小数誤差解析に関する簡単な説明を行う。
 を実数とするとき、
を実数とするとき、 の浮動小数値を表す記号として
の浮動小数値を表す記号として を用いることにする。基本的な仮定としては次がある。
を用いることにする。基本的な仮定としては次がある。
|
(16) |
ここに は(1)に示される相対精度(unit
roundoff)を意味する。もちろん
は(1)に示される相対精度(unit
roundoff)を意味する。もちろん
|

|
(17) |
Example 5.1
(浮動小数)
ここでは10進4桁の演算を考える。このとき である。今、
である。今、 とすると
とすると であり
であり となる。
となる。 とすると
とすると であり
であり となる。
となる。 とすると
とすると であり、このときも
であり、このときも となる。
となる。
今、 を浮動小数とすると、Wilkinson
[1960]
によって紹介された浮動小数演算の標準モデルは(16)に基づき
を浮動小数とすると、Wilkinson
[1960]
によって紹介された浮動小数演算の標準モデルは(16)に基づき
|
(18) |
 は表現可能な浮動小数値を生成するものとする。(17)に対応する形で次の関係式が導かれる。
は表現可能な浮動小数値を生成するものとする。(17)に対応する形で次の関係式が導かれる。
一連の浮動小数演算について考えるとき、誤差項の積としてしばしば次の形のものが得られる。
それ故、
今、2次の項を無視することにすれば

|
(19) |
次に3つの例を示す。いずれにおいても は浮動小数値とする。すなわちそれらはコンピュータ上で既に表現されている値とする。これは計算に際しての誤差を分析する上において自然な仮定である。
は浮動小数値とする。すなわちそれらはコンピュータ上で既に表現されている値とする。これは計算に際しての誤差を分析する上において自然な仮定である。
Example 5.2
(値の積)
 とする。
とする。 個の積を構成する必要があり、それぞれが
個の積を構成する必要があり、それぞれが を上限とする誤差を生むことになる。(18)から
を上限とする誤差を生むことになる。(18)から

|
(20) |
一方、(19)から
|
(21) |
 である。(21)より結果は厳密解に近いため、この計算は前向きに安定であることがわかる。一方、(20)より結果はわずかな摂動に対して厳密である、すなわち結果はデータ
である。(21)より結果は厳密解に近いため、この計算は前向きに安定であることがわかる。一方、(20)より結果はわずかな摂動に対して厳密である、すなわち結果はデータ に対して厳密であるため、この計算は後向きにも安定であると言える。
に対して厳密であるため、この計算は後向きにも安定であると言える。
Example 5.3
(値の和)

 とする。
とする。 と書けることを考慮すると次が容易に導ける。
と書けることを考慮すると次が容易に導ける。
これより和は後向きには安定であるが、前向きには安定とは限らないことがわかる。Example
3.1は和が前向きに安定でないケースを示すものである。
 がすべて同じ符合を持つ場合には
がすべて同じ符合を持つ場合には より
より となるため、和は前向きに安定となる。
となるため、和は前向きに安定となる。
Example 5.4
(2平方の差)
次の計算について考える。

|
(22) |
もちろん は次のようにも表現できる。
は次のようにも表現できる。
|
(23) |
(22)をベースに の計算を行うと
の計算を行うと となるため、後向きには安定であるが、前向きには安定ではない。一方、(23)
をベースに
となるため、後向きには安定であるが、前向きには安定ではない。一方、(23)
をベースに の計算を行った場合には
の計算を行った場合には となるため、後向きにも前向きにも安定となる。具体的に
となるため、後向きにも前向きにも安定となる。具体的に としたとき、有効桁数4桁での計算を行うと
としたとき、有効桁数4桁での計算を行うと という結果が得られる。
という結果が得られる。 の場合には桁落ちが生じているが、
の場合には桁落ちが生じているが、 の場合には問題なく計算が行えている。
の場合には問題なく計算が行えている。
今度は線形代数の問題に関するいくつかの結果を紹介する。ただし証明は抜きにし、結果の引用のみに留める。基本的に 個の連立1次方程式
個の連立1次方程式

|
(24) |
 番目のステップは
番目のステップは

|
(25) |
 と
と は置換行列(permutation
matrices)で、枢軸選択法(pivoting
strategy)に合せて選択される(単位行列であっても良い)。また
は置換行列(permutation
matrices)で、枢軸選択法(pivoting
strategy)に合せて選択される(単位行列であっても良い)。また は乗算行列(multiplier
matrix)で、
は乗算行列(multiplier
matrix)で、 の
の 番目の対角要素より下にある要素を消去すべく選択される。因子分解(factorization)の結果は次のようになる。
番目の対角要素より下にある要素を消去すべく選択される。因子分解(factorization)の結果は次のようになる。
ここに は置換行列、
は置換行列、 は単位下三角行列(unit
lower triangular
matrix)、
は単位下三角行列(unit
lower triangular
matrix)、 は上三角行列(upper
triangular
matrix)である。解析を簡単化するために、慣行に従って
は上三角行列(upper
triangular
matrix)である。解析を簡単化するために、慣行に従って は
は のように既に並べ替え(permute)られているとする。この場合、(25)
は
のように既に並べ替え(permute)られているとする。この場合、(25)
は のようになる。ただし
のようになる。ただし と
と は
は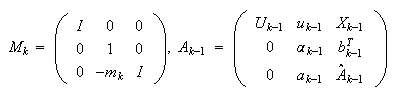 のような形を持つ。
のような形を持つ。 は
は を消去できるように選択されるため、
を消去できるように選択されるため、 という関係にある。
という関係にある。 は
は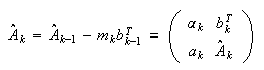 のように更新される。このとき
のように更新される。このとき となる。
となる。 であるため
であるため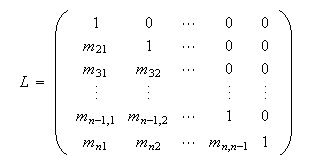 と表現される。このとき計算結果である因子
と表現される。このとき計算結果である因子 は
は を満たすことが示される。ただし
を満たすことが示される。ただし に関する種々の上限があり得る。例えば
に関する種々の上限があり得る。例えば または
または ノルムに関して言えば
ノルムに関して言えば が成立する。ここで
が成立する。ここで は成長因子(growth
factor)と呼ばれる。同様に(24)
の計算解
は成長因子(growth
factor)と呼ばれる。同様に(24)
の計算解 が
が を満たすことが示される。この場合の典型的な上限は
を満たすことが示される。この場合の典型的な上限は で与えられる。この不等式は
で与えられる。この不等式は が大きな値でない限り順当なものと言えるので、
が大きな値でない限り順当なものと言えるので、 のサイズを抑えられるように
のサイズを抑えられるように を選択することが大切である。これが本質的に
Wilkinson [1961], Wilkinson [1963, Section 25]
の結果である。ただしそこでは
を選択することが大切である。これが本質的に
Wilkinson [1961], Wilkinson [1963, Section 25]
の結果である。ただしそこでは ノルムとpartial
pivotingが仮定されている。Higham
[2002, Theorem 9.5]
についても参照されたい。
ノルムとpartial
pivotingが仮定されている。Higham
[2002, Theorem 9.5]
についても参照されたい。
次はpivotingの必要性を示す簡単な例である。
Example 5.5
(Pivotingの必要性)
行列を とし、有効桁数4桁の計算を行うものとする。
とし、有効桁数4桁の計算を行うものとする。 は単なる
は単なる 行列のため、
行列のため、 となる。算出された行列
となる。算出された行列 を
を と書くことにすれば、計算の結果は次のようになる。
と書くことにすれば、計算の結果は次のようになる。
これより 従って
従って となる。
となる。 は
は に比べると小さいながら、
に比べると小さいながら、 の大きな相対摂動(relative
perturbation)に対応する。一方、
の大きな相対摂動(relative
perturbation)に対応する。一方、 の行を入れ替え、
の行を入れ替え、 とすると
とすると
これより 従って
従って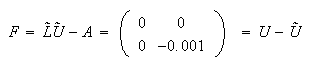 となる。今回の場合、
となる。今回の場合、 は
は 双方に比べて小さな値となっている。
双方に比べて小さな値となっている。
今、 とすると
とすると であることを示すことができる。Partial
pivotingを使えば
であることを示すことができる。Partial
pivotingを使えば とすることができる。しかし極めて特殊な場合にはこれに近づけることができない。Wilkinsonが示した例で言うと
とすることができる。しかし極めて特殊な場合にはこれに近づけることができない。Wilkinsonが示した例で言うと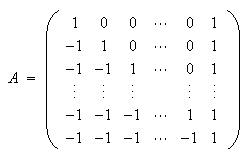 であり、このとき
であり、このとき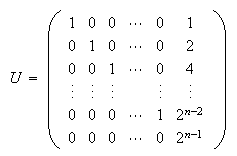 となる。このような特殊な例はあるものの、現実問題としてはpartial
pivotingは最も良く使用される手法である。しかし慎重なソフトウェアであれば少なくとも成長因子をモニタできるオプションを用意すべきである。
となる。このような特殊な例はあるものの、現実問題としてはpartial
pivotingは最も良く使用される手法である。しかし慎重なソフトウェアであれば少なくとも成長因子をモニタできるオプションを用意すべきである。
 の成長を制御する上でpivotingを必要としない行列のクラスもある
[Higham, 2002, Table
9.1]。最も重要なのは対称正定値行列(symmetric
positive definite
matrices)のケースであり、その場合には成長が起り得ないことが最初から知られている。従って係数行列が対称正定値である連立1次方程式にガウス消去法を適用した場合には、計算は安定したものとなる 。(Note2)
の成長を制御する上でpivotingを必要としない行列のクラスもある
[Higham, 2002, Table
9.1]。最も重要なのは対称正定値行列(symmetric
positive definite
matrices)のケースであり、その場合には成長が起り得ないことが最初から知られている。従って係数行列が対称正定値である連立1次方程式にガウス消去法を適用した場合には、計算は安定したものとなる 。(Note2)
Pivotsの選択はスケーリングと平衡化(equilibration)によって左右される。スケーリングの選択がまずいとpivotsの選択も望ましいものとはならない可能性がある。Pivoting戦略、平衡化、スケーリング、及びそれらに関する助言については
Higham [2002]
に記載されている。
直交変換(orthogonal
transformations)を用いる手法に対しては誤差の上限として似たような結果を通常得ることができるが、直交変換は ノルムと
ノルムと ノルムを維持するために、その中には成長因子は含まれない。例えば最小2乗問題
ノルムを維持するために、その中には成長因子は含まれない。例えば最小2乗問題
 の解法における
の解法における に対し
に対し 因子分解を行うためにHouseholder変換を用いるとする。ただし
因子分解を行うためにHouseholder変換を用いるとする。ただし は
は 行列で階数(rank)は
行列で階数(rank)は とする
[Golub,
1965]。このとき数値解
とする
[Golub,
1965]。このとき数値解 は
は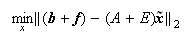 を満足する。ただし
を満足する。ただし を小さな整定数とするとき、
を小さな整定数とするとき、 に対しては次の不等式が成り立つ
[Lawson and Hanson, 1995, page
90]。
に対しては次の不等式が成り立つ
[Lawson and Hanson, 1995, page
90]。
 を
を 行列としたとき、固有値問題
行列としたとき、固有値問題 の解法に際して、まずHouseholder変換を用いて
の解法に際して、まずHouseholder変換を用いて を上(upper)Hessenberg形式に変換した後、
を上(upper)Hessenberg形式に変換した後、 アルゴリズムを用いてHessenberg形式を上三角Schur形式に変換するものとする。このときの数値解は
アルゴリズムを用いてHessenberg形式を上三角Schur形式に変換するものとする。このときの数値解は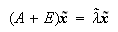 を満たす。ただし
を満たす。ただし を
を の漸増関数としたとき
の漸増関数としたとき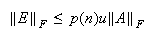 が成り立つ [Wilkinson, 1965; Anderson et al.,
1999]。
が成り立つ [Wilkinson, 1965; Anderson et al.,
1999]。
なお、これまで議論してきた上限はnormwise
boundsと呼ばれるが、多くの場合においてこれらはcomponentwise
boundsで置き換え得る。後者は個々の要素の絶対値に関する上限であり、より都合の良いものである。例えば が疎行列である場合、我々は構造的に
が疎行列である場合、我々は構造的に である要素に対して摂動を加えることは好まないであろう。簡単な例として方程式
である要素に対して摂動を加えることは好まないであろう。簡単な例として方程式 について考える。ただし
について考える。ただし は
は の三角行列とする。今、
の三角行列とする。今、 を前進代入(forward
substitution)、あるいは後退代入(backward
substitution)によって得られた数値解とするとき(前進/後退のいずれを用いるかは
を前進代入(forward
substitution)、あるいは後退代入(backward
substitution)によって得られた数値解とするとき(前進/後退のいずれを用いるかは が下三角か上三角かによる)、
が下三角か上三角かによる)、 は次の条件を満たす。
は次の条件を満たす。
これは後向きの安定性を示す強力なcomponentwiseの結果である
[Higham, 2002, Theorem 8.5]。
Componentwiseの誤差上限値に付随してcomponentwiseの条件数(condition numbers)がある。詳細については Higham [2002] を参照されたい。